- LoginX
User login
Enter your username and password here in order to log in on the website
Forgot your password? - NEWSLETTER
- CONTACT

In the land where the sun rises and Mount Fuji inspires
Short story about a technical TSP demonstration by Thomas Dickmann
The view of the 3776 m high stratovolcano Fuji is significant. It is hardly possible to take snapshots without the growing traffic infrastructure in the Land of the Rising Sun. While a highly built motorway winds its way through the bizarre mountain landscape of Honshu, Dirk and I sit in a Shinkansen bullet train, which whizzes past Mount Fuji at 300 km/h. The view of the volcano is very impressive. We are on our way to Nagoya, where we will arrive after about an hour from Tokyo Shinagawa Station.
Another building of the future awaits us. This is where Central Japan Railway is building the next generation of high-speed lines – the magnetic levitation railway or short Maglev. It will cover the almost 300 km long distance in 40 minutes instead of 85 minutes. That’s achievable at a top speed of 500 km/h.
The project is controversial – yes, we are talking about Japan here – because like in other parts of the world, farmers are afraid that their agricultural plots above the long tunnels will no longer be adequately irrigated if rivers like the Oi River reach low levels when water flows underground to the tunnels.

And indeed, our drive from Nagoya takes us through lovely countryside alongside dry fields, which is probably more due to the dry winter weather. We reach our destination, a Maglev tunnel construction site of Nagoya branch. We have come to show the local contractor Shimizu our new TSP 603-Impact system.
Actually, TSP 603-Impact, the cutting edge technology of Tunnel Seismic Prediction, is rather intended for use in tunnel boring machines. The small explosive charges used so far with TSP to excite seismic waves make the application in TBM drives difficult or impossible. The new TSP Impact uses an Impact hammer and is supposed to excite seismic waves on the tunnel wall whenever the machine has finished its stroke. If these waves encounter faults in the rock, they are reflected by them and can be picked up by the TSP receivers. These are also located 1.5 m deep in the rock along the tunnel wall to the left and right. Together with their transceivers, they convert the signals into digital data and send them wirelessly via a WiFi module to the operator’s tablet PC. Incidentally, the operator also controls the hammer with the tablet, again via wireless remote control. This way, there are no cables lying around in the front working area of the TBM and they cannot be torn off either. This makes the seismic prediction system virtually invisible to the tunnel builder and it only works when it receives commands from the tablet.

Our Maglev construction site is being excavated by conventional blasting, as in most cases in Japan. Japanese contractors are aware of the risks of the local geology and therefore build in short blasting rounds of 1 to 1.5 metres with four blasts per day. In addition, Shimizu relies on the geological predictions of the TSP system and uses it regularly here. Shimizu maintains two former models of TSP 303 for this purpose, which are stationed at the headquarters in Tokyo. Due to the rather low advance rates, the systems can then be recalled to the construction site each time it becomes necessary again. For this, the TSP team of experts from Tokyo arrives together with the equipment. In a few hours, everything is done and the team leaves again to take care of the immediate evaluation of the data.
In a TBM drive, on the other hand, the system would remain on site, because at least the impact hammer would be permanently installed behind the cutting wheel, while the receivers/transceivers would be regularly repositioned. In this case, as much data is collected on the tablet until a next forecast range can be delivered. The data is sent via cloud transfer to the experts in Tokyo, where they deliver the result within hours.

Back in our demo tunnel of the new Maglev line. In the meantime, together with the diligent colleagues of our Japanese distribution partner FTS Ltd., we have had a small red excavator delivered directly to the tunnel. As our demo equipment is also on-site, we equip the excavator with our impact hammer, the control unit, and an 8-bar compressor. The latter two get a mains power connection and the hammer can start hitting the wall. Everything is fine so far. Now we mark the four points on the tunnel wall where the drill rig should drill the receiver holes during the night.
The next day we wait for our mission. A blow-off in the morning and the subsequent mucking and rock support with shotcrete and rock anchors must be completed first. 1pm… we get the green light and are permitted to drive in. In the meantime, our Japanese hosts from Tokyo have also arrived. We already know some of them and we are in a good mood and look forward to the demonstration in the afternoon.

While we are still checking the drill holes for the receivers, our new product is inspected. Lights flash and murmurs go through the tunnel vault. We are in our element and can proudly demonstrate what we have been working hard for, especially for the last two years; just for this moment when the customer is amazed and acknowledges us with a simple oohhh – the simplest Japanese sound that expresses delight.
Everything runs smoothly according to plan. Dirk and I set up the four receivers and transceivers and with the small router case we have set up TSP’s own WiFi network in seconds. All devices are recognised: four transceivers and the control unit of the impact hammer communicate with each other.
Oohhh!!

Now, briefly instruct the excavator driver and he then drives to the first of 30 impact points. He places the excavator arm, on which the hammer is hanging, just in front of the wall and Dirk makes the hammer move against the wall via his own pneumatic feed cylinder. It is braced against the wall and everyone is curious to see what will happen now.
Dirk gives the strike command on the tablet and the hammer starts hitting the wall. Once, twice, three times … a strike every 10 seconds.
In the end there are eight strikes per position. Done! Move the hammer back, move the excavator arm back and move the excavator 1.2 m further to the next impact point. Move the excavator arm to just before the wall and preload the hammer again.
Strike!

When the excavator driver had already gained some routine, he and we needed 2.5 minutes per hitting point. Amazing. And so easy!
After 2 hours the entire demonstration was completed and the Japanese Oohhh was now joined by our simple Puhh!
Mission successfully completed…. regarding the operation in the tunnel.
Isn't success also measured by the actual result?
What about the prediction range and does the data show a relevant forecast for the tunnelling?
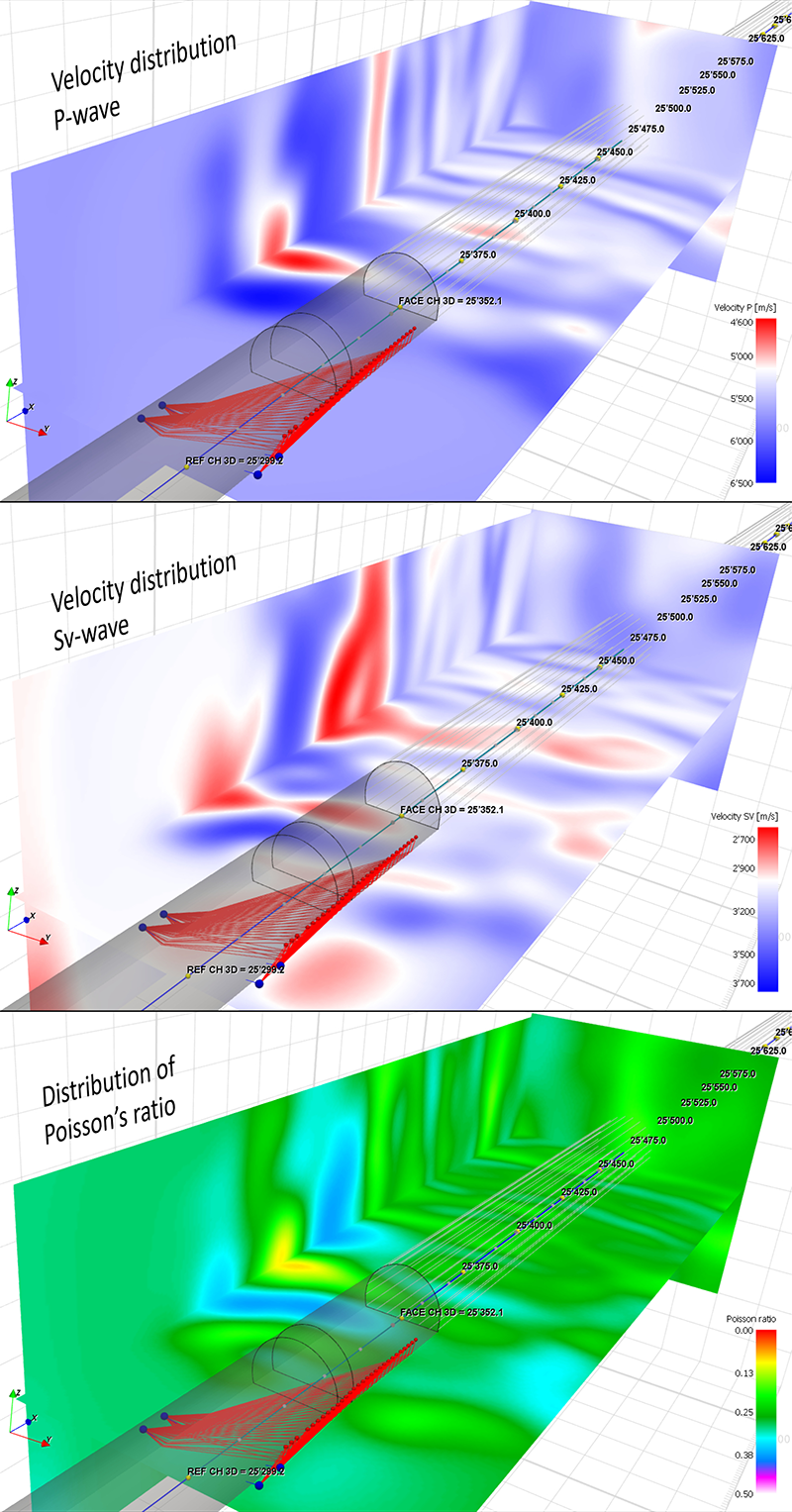
The exploration range of the impact hammer as a seismic source extends more than 100 m ahead of the tunnel face! The favourable geological conditions with good granite, which had a P-wave velocity of 5,140 m/s or 2,970 m/ for the S-wave in the area between the receiver and source points, were certainly also advantageous here. The data show two zones of lowered velocities in the forecast range starting about 45 metres, respectively 73 metres ahead of the face, indicating disturbed or brittle rock. Fortunately, there is no evidence of dewatering in the rock, as the calculated rather low values for the Poisson's ratio near the tunnel profile do not suggest it. However, the tunnel builder should pay attention to the ground conditions that may deteriorate along the next 100 metres due to presence of multi-fracture and weathered zones or clay layers.
Mission successfully completed!